機械三吳昀翰、簡昱辰、鄭詮鏵、邱勁翔、張毅賢、許魯洺
引言
牛頓曾言:「如果我看得比別人遠,那是因為我站在巨人的肩膀。」前人的智慧帶給牛頓得從制高點眺望世界的機會,然而牛頓卻不曾被過去的框架所束縛,他打破既有的思維,不斷地提出影響後世深遠的理論。
本次機械設計題目雖與去年相同,給予我們學習、效法學長姐智慧的機會,但本組希望能跳脫既有的框架,打造一台不同於所有組別的「螃蟹撞球號」。
課程介绍與規則
「機械設計原理」是機械系大學部三年級上學期的必修實作課程。由廖先順教授指導,此課程的內容是由六位同學一組共同設計、製造一台「撞球車」。簡單的介紹為,撞球車能在地面上移動,並且可以操控竹筷進行「撞擊」彈珠的動作,並且將10顆彈珠撞入得分袋口。以下為測試過程中撞球車之限制條件:
一、撞球車的體積必須小於直徑 15 cm 高 20 cm 的圓柱
二、只能使用竹筷子進行「撞球」之動作;
三、撞球車需從「起始區」開往「中央撞球區」,將所有彈珠彈出開球區方可離開中心區域
四、每一格得分袋口最多能容納三顆彈珠
五、整個過程只有十分鐘的時間限制,超時的組別則計算當下的成績為主
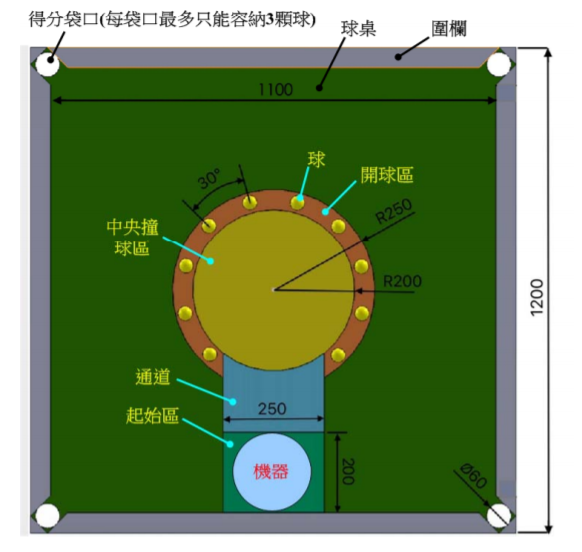
█ 【圖片來源:機械設計原理第一週之投影片】
設計理念
由於測驗核心需求為能自由移動且需要進行撞球之動作,因此我們覺得大多數人的想法一定聯想到「坦克」的外觀。也的確如此,大部分人都將擊球機構放在車子的正中央,並且擊球軸向與輪胎前進後退方向相同,而這也代表著他們喪失水平直接移動調整的能力。然而試想真正撞球選手擊球的姿態,大家都是將球桿放在慣用手那一側並得以直接平移球桿,因此我們以此為設計方向,將擊球機構(竹筷)放在車子的側邊,並將輪子移動方向垂直於擊球方向。為避免違反規則,我們預先利用CAD2D圖形進行模擬並確認在各個擊球位置都不會壓線、越線。此外,我們希望大大的降低車子故障率,畢竟沒有人想要在最終測試前因零件的不穩定性、疲勞性…等等的問題影響測驗結果,於是本組撞球車整體設計理念自始自終都圍繞著「簡單」、「有效」以求將穩定性提升到最高。
從圖一,我們可以得知場上的四顆球在任何設計下都是有辦法一桿進洞的,然而剩下的六顆就沒那麼容易。方法一、將球打入得分袋口附近,之後再撞入得分袋口內;方法二、擊打彈珠的側邊,使球呈一角度擊入得分袋口。方法一較為簡單,但是所花的時間以及杆數會比較多;方法二雖然解決了時間以及杆數的問題,但是技巧過於高超,一桿進洞難度非常高。
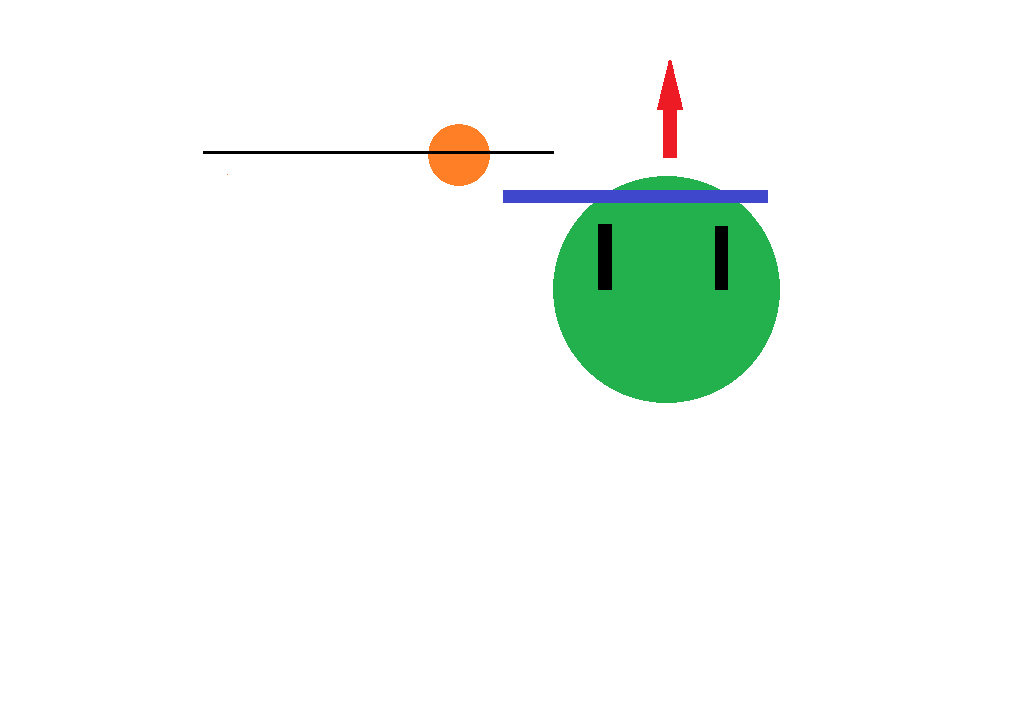
但是如果使用側邊擊球(圖二),我們可以發現剩下的六顆球都有辦法與得分袋口呈一水平線,使得每一顆球都能一桿進洞,不僅僅縮短了擊球時間,也大大減少了擊球杆數,擊球難度簡單。為了增加命中率,我們在擊球機構上方使用一字雷射,將擊球軌跡可視化,減少眼睛瞄準的誤差。
如果使用坦克之設計,我們會遇到一個問題是當彈珠靠在墻壁,那顆球是沒辦法進入得分袋口的。若使用側邊擊球(圖三),我們可以發現靠在墻壁上的球十分容易擊打進入得分袋口。此外,我們將撞球車設計成圖四的樣子,除了有助於原地回轉以及前進,這樣的設計使得我們更簡單地瞄準彈珠。
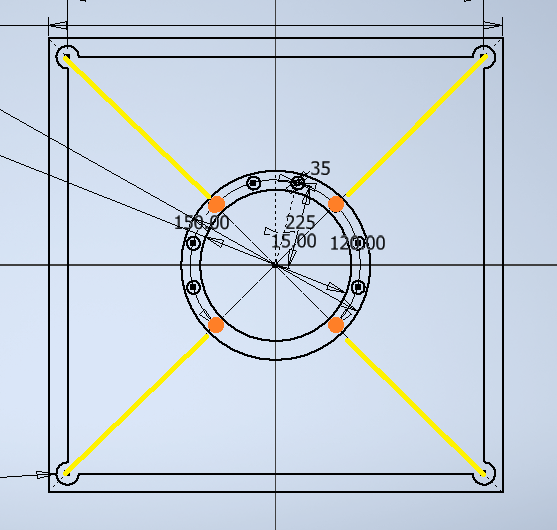
█ 【圖一、容易一桿進洞的四顆球】
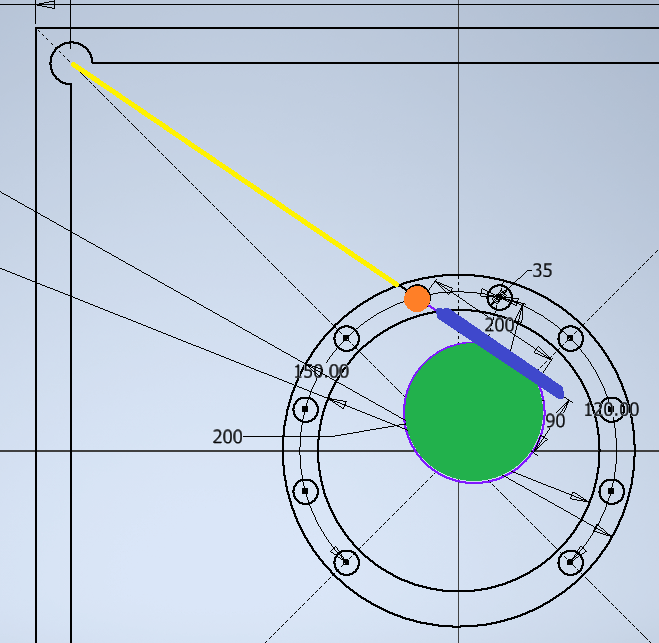
█ 【圖二、側邊擊球之模擬】
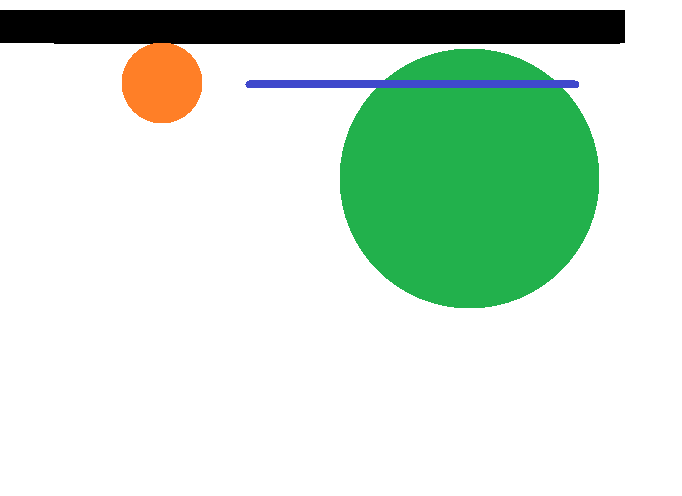
█ 【圖三、球緊貼墻壁之情況】
█ 【圖四、撞球車之輪子與移動方向】
製作過程
本組的撞球車我們命名為「Krabbe」。此名字源於德文中「螃蟹」的意思,擊球前能夠將球桿水平移動,並進行精準的微調,創造大量一桿進洞的機會是本組Krabbe號最大的特色,而這種側向移動的方式令人不禁聯想到同為側向走路的螃蟹,也因此得名「Krabbe(螃蟹)」。
為求達到最高的效率以及最快的進度,以避開測試前機台使用壅塞,我們在學期初便已與各組員確認時間,訂立每周至少一次的開會時程,並且利用多次開會討論腦力激盪確認「Krabbe」的設計與製作方向,並於第二周完成甘特圖、時程與任務分配。本組將整台車分為主要幾個部分,分別是擊球機構、車體整車配置、移動機構以及電系控制。其中所有的截止日期都訂為實際截止日期的前一個星期,這樣替組員彼此之間增添一些進度壓力,使得我們能更快速、確實且有效率地完成我們的「Krabbe」。幸運的是本組組員都十分積極,所有進度在測試前兩周都已提前完成,無一延遲、拖延,而這也為我們測試前的小意外提供了充沛解決問題的時間預度。
完成本組時間規劃與工作分配後,我們盡速完成設計,並且採購符合設計需求之零件與材料,主要偏向簡單、實際、便宜最重要的是易取得的方向購買,本組希望零件易取得為主要原因是避免後續零件出錯時所需面臨採購困難的情形。此外,我們還利用創新實作中心的機台來加工材料,減少在外面加工的支出。為了增加車子的剛性,我們決定使用壓克力板取代通常使用的密集板來製作我們的「Krabbe」。本組製作的時程與設計時程有些微重疊,目的是希望兩者不衝突的部分可以並行,提高效率,然而在製作的過程中,撞球車的設計會不斷的更新,導致部分零部件很可能需要重新製作,為了避免浪費過多壓克力板材,我們在前期的雛型多使用廢棄的密集板,這也替我們的設計雛型生產節省了許多成本。
事實上在製作的過程中,由於與以往設計架構有很大程度的創新,因而衍生出許多大大小小的問題,於是本組在開會討論時,將很多可能會發生的問題與意外納入考量,將這些想法記錄,集思廣益找尋解決方法並一步一步放進「Krabbe」中改善。其中包括了將擊球機構放在側邊,而此設計會導致「Krabbe」在擊球時產生力矩,進而導致車體轉向。為了解決此問題,我們在擊球機構的另一側增加多塊金屬塊配重,這個問題也由此得到很大程度的改善。此外,我們的擊球機構是使用缺齒輪以及彈簧兩者互相配合,達到簡單的設計以及足夠強的擊球力道,但是遇到的問題是內齒輪會出現崩齒的現象,因此我們通過改良擊球設計,增加多片缺齒輪以求增加接觸面積,盡可能地減少齒輪所受之應力,同時將齒輪納入「消耗品」的材料列,在製作過程中額外備置數片,以備不時之需。
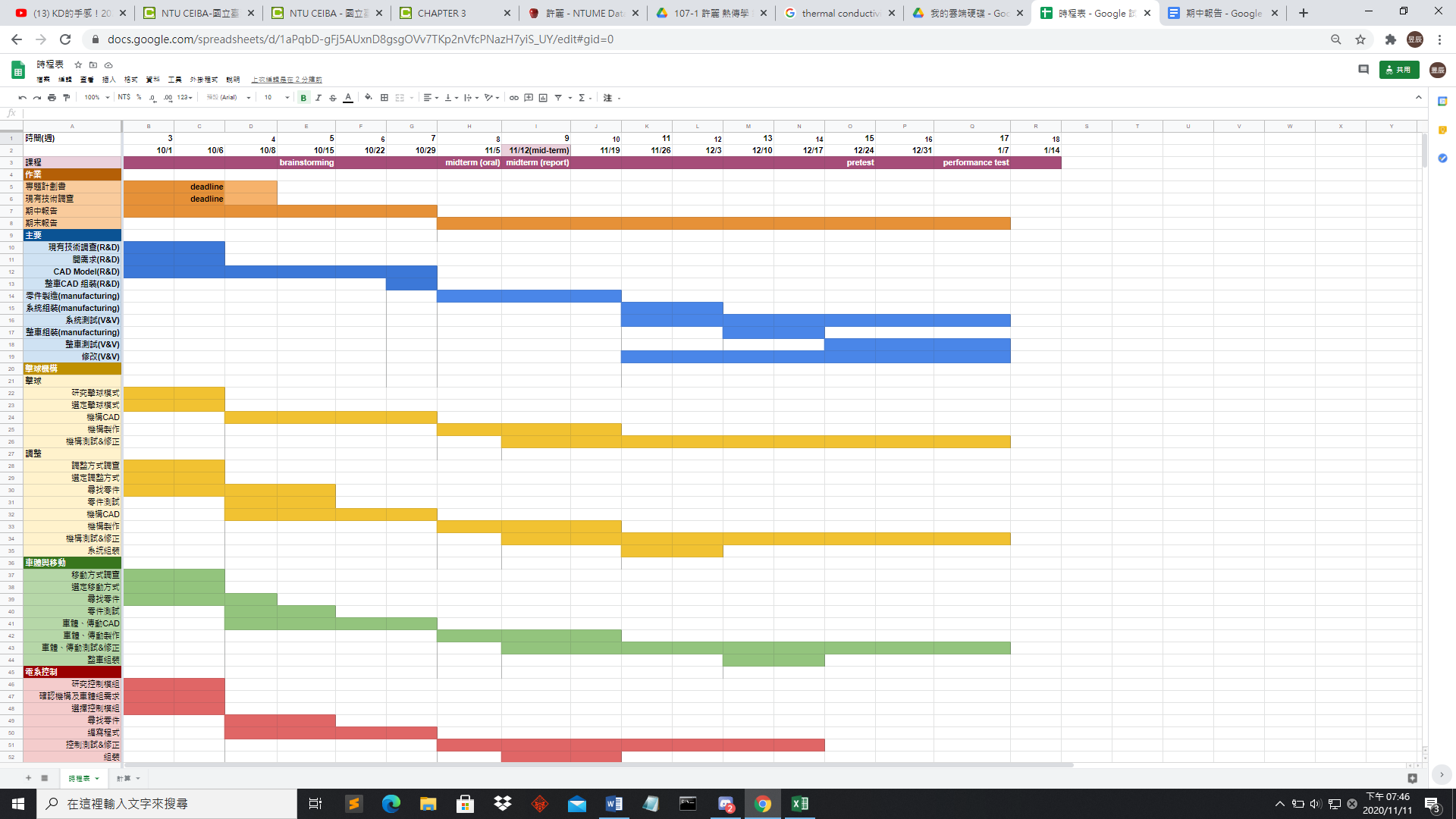
█ 【圖五、甘特圖】
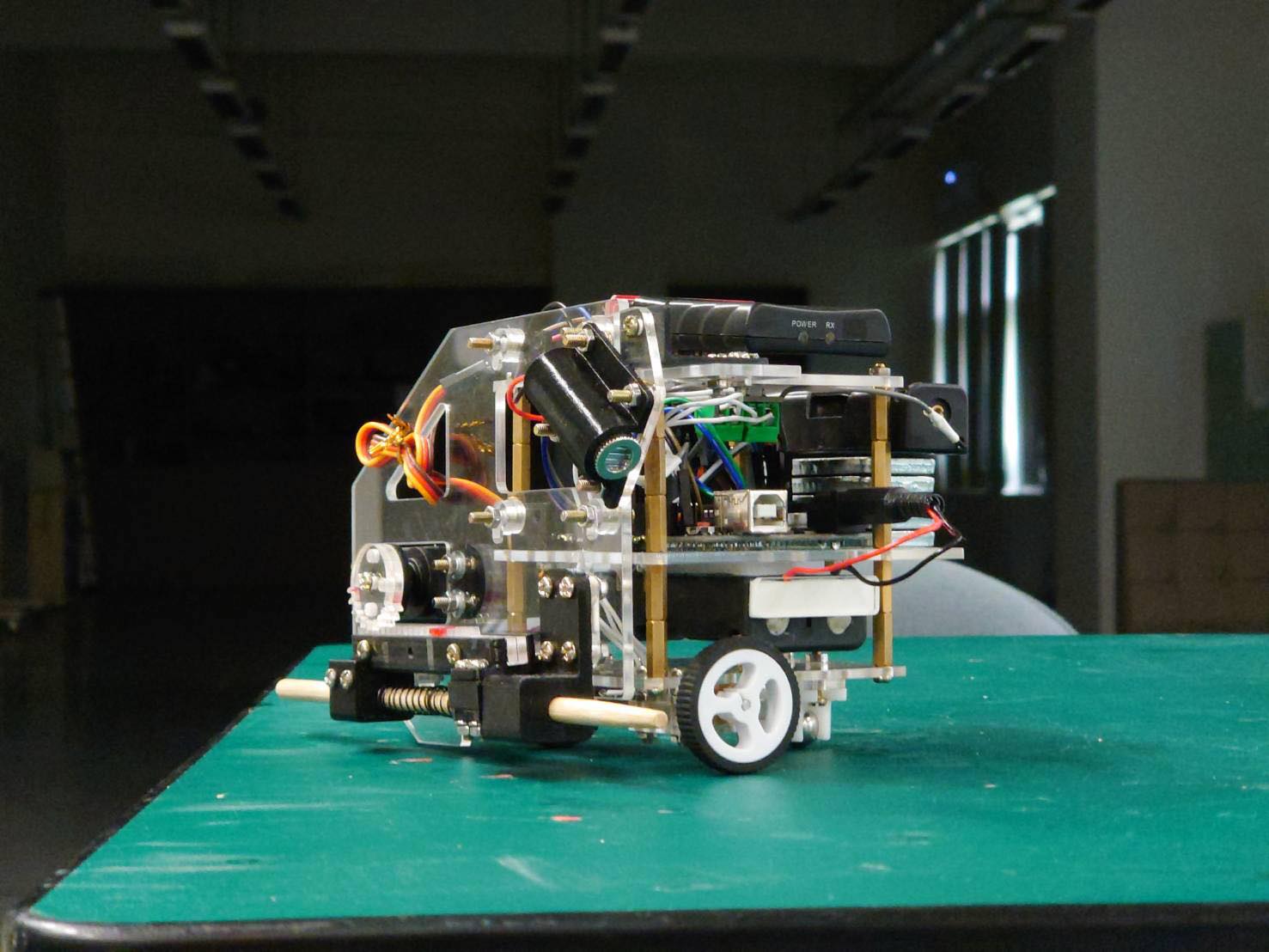
█ 【圖六、「Krabbe」的外型】
「Krabbe」的成績
在「Krabbe」的誕生後,我們多次到比賽場地進行練習,並且構思能提升Krabbe性能與展現的方式。雖「Krabbe」備有雷射瞄準,但為了讓雷射在關鍵時刻故障時,本組操作員仍能順利完成擊球,本組在事先練習階段即要求操作員練習在無雷射瞄準的情況下進行擊球。在設計以及程式的優化之下,「Krabbe」在本組平時測驗時成績分別落在有雷射:十至十二桿、無雷射十至十五桿,兩者時間皆落在三至四分鐘之間。而當中最好的成績為十杆數、三分鐘七秒,這的確是十分亮眼的成績。
然而在實際課程中的「Pretest」與「Final Test」中,成績表現卻出乎了我們意料,主要的原因如下列所述:
在pretest時,測驗用的竹筷內徑與助教事先發放的有落差,而此情形進而導致固定竹筷的零部件尺寸不合,雖然我們臨時使用紙片墊壓,但由於整體尺寸的更動,在測試過程中出現了干涉的情形,使我們花費較多時間維修,但所幸仍順利完成pretest最終測試時,本組已有前車之鑑,故備下不同尺寸的鎖固件,然而人算不如天算,期末測試本組卻遇到了竹筷長度不合的情形,其所帶來的影響遠大於內徑的不合,長度的改變破壞了本組預設的擊球計畫,在四邊分別各有一顆球擊球是會過度的逼近邊緣,進而導致測試時竹筷觸碰到彈珠,使本組被罰兩顆球(但本組仍以3分多鐘、9桿進8顆球的成績完成測試)
我們遇到的問題
在製作過程中我們遇到許多執行上與技術上的困擾,大部分都在全組組員的努力下順利解決,然而仍存在許多「待解決的問題」而以下將分享其中幾個造成較大影響的問題:
i.創新機構的衍生問題(測試竹筷尺寸不一、場地尺寸不一):
雖然我們竭盡所能地為可能發生的突發意外(竹筷尺寸的影響)進行最周到的安排,但由於本組的設計的確不同於以往,許多問題往往完全出乎我們的意料之外,雖然最終仍取得不錯的成績,但仍存在一定的改善空間。
此外,雖然竹筷為主要問題,但課程放置於系學會提供學生模擬的場地與課程某些班級實際測驗的場地抑有所不同,為提供兩班同時測驗,製作了兩個場地,然而其洞口尺寸卻有很大的不同,雖然沒有造成太大的影響,但當下看到場地跟測試時不一樣的確有嚇到。
改善方法:課程設計階段可以採用較具一致性的測驗器具(例如加工過尺寸一致的木材或金屬棒之類的擊球工具),畢竟竹筷的選用勢必會遇到彎曲、長短、粗細……等等的問題,造成測驗的不公平性。
ii.學校設備的限制:
課程設計給機械系一百多位同學,共分成二十多組,然而學生最依賴的3D列印機台卻寥寥無幾,到了製作的階段,甚至連收費的計中3D列印都排不到,永齡生醫大樓的設備更常常故障,而修復時間往往又很長,上述現象無疑帶給學生許多不可抗力之因素。
改善方法:系上硬體設施的升級與維護將會提供最直接的幫助,包含可使用數量與故障率的維持,往往雖已反應但卻無改善情形(機械工程實務更出現測試前一兩周只剩一、兩台可以用的情形),此外,耗材的補充(螺絲螺帽),尤其是常常使用的尺寸也需加強。
結語
「機械設計原理」這門課猶如一個完整的專案實習,從最開始的概念發想,到機構開發、雛型設計,以及實際生產製作一台「撞球車」,課程帶來練習系統化完成專案的最好機會。同時在人事上,我們與來自世界不同角落的組員們一起共事,一起解決困難,不僅培養了默契,也在各自身上截長補短,在學術上、人際關係上都有顯著的進步。本組組員:鄭詮鏵、簡昱辰、許魯洺、張毅賢、吳昀翰以及邱勁翔,大家都為「Krabbe」的誕生盡心盡力,並且投入大量的時間與精力,感謝「機械設計原理」課程以及指導教授廖先順教授與助教提供我們實際規劃與製作的機會,磨練我們、打好基礎,使我們在下學期的「機械工程實務」能夠規劃得更得心應手。 
點閱人數