文、圖◎黃漢邦教授、詹澤鋒同學
仿生全人形機器人—尼諾(NINO)
近年來,機器人作為主角的題材在流行的影視娛樂中經常出現,這顯示了人類對機器人的幻想和嚮往。為了促進仿生人形機器人的發展,台灣大學機械工程系黃漢邦教授領導的機器人實驗室研究團隊在三年的努力之後,完成了一個全人形機器人,該機器人由機構、電路和控制算法完全自行設計和開發。這雙足人型機器人名為尼諾(Nino)。
臺大機械系機器人實驗室所研發出的全人形機器人名為尼諾(Nino),高145公分,重68公斤,主要機械結構由鋁合金打造。他的雙手臂和雙腿各有6個自由度,其中的馬達減速機構使用無背隙的和諧減速機以及皮帶輪。腰部有2個自由度,可以裝上多自由度的雙手掌,可以藉由手臂及手掌的共同合作達成抓握及手語等各種任務。脖子具有2個自由度,可以使機器人俯仰及轉頭,臉部有LED面板可以顯示表情。各個運動的自由度皆有位置感測器,可監控運動狀態。雙腳並裝有六軸力規可以取得腳底受力狀態,另外也有各種感應器能夠監控機器人的電流、電壓、溫度等狀態,進而增加機器人的安全性與運動的穩定性,全身總共有52個馬達與108個感應器,藉由各種感測器的資訊,使我們可以採取各種各樣的控制演算法,使機器人達到不同的任務。另外在機器人身體內獨立裝有大容量的鋰鐵電池,並配合自行設計之電源管理程式,使電池充放電最佳化並延長電池使用壽命,使機器人提高續航力且可獨立行動,不須外接電源而受限。
以下將更詳細的介紹尼諾的各部位與控制系統:
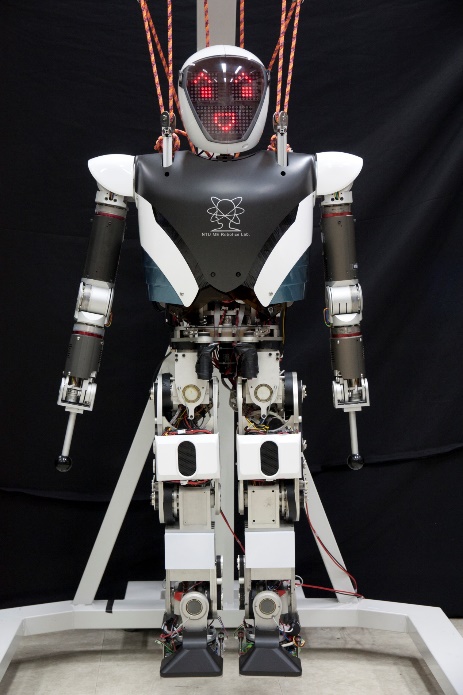
█ 尼諾的全身正面圖
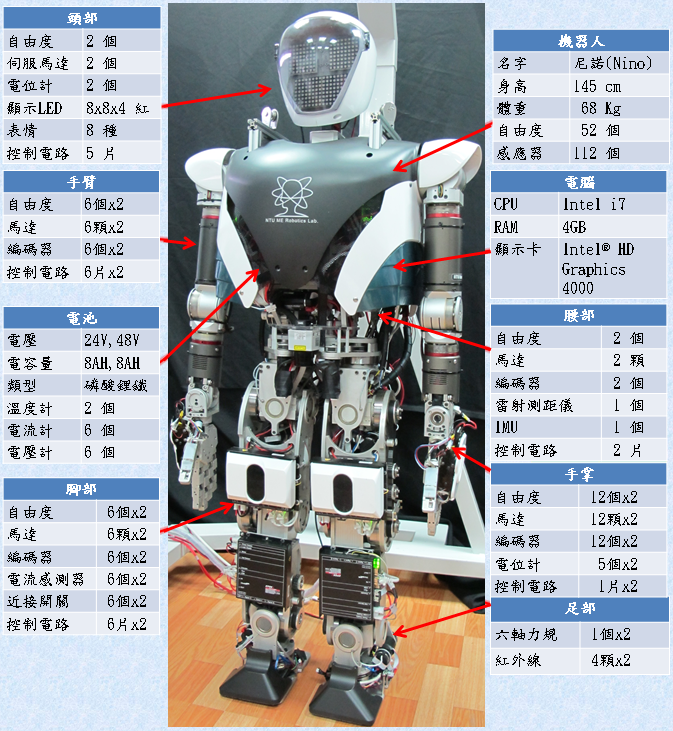
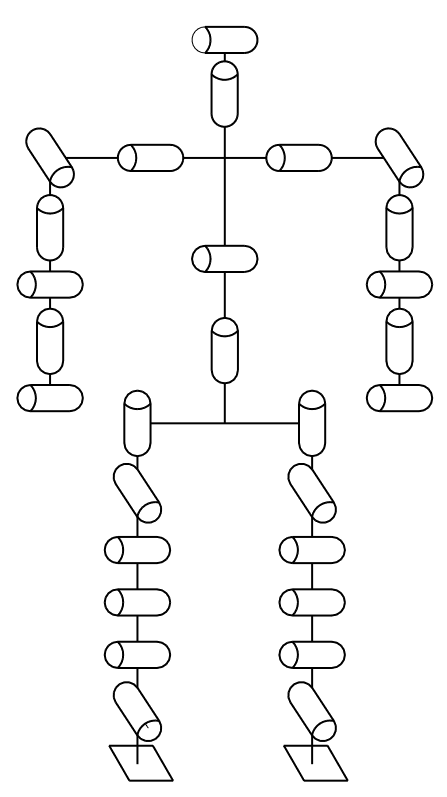
█ (a) 機器人規格 (b) 自由度配置
頭部:
尼諾主要是以人做為開發的指標,並期許它能在人類的生活環境中工作,因此外型和表現上也必須要能親近人類,而其中一個很重要的關鍵就是要能有表情的顯示,因此在臉部製作上加入了表情顯示系統,利用LED陣列來替尼諾加上生動的表情,也製作頭部來包覆控制臉部表情的電路板,如圖3所示。目前尼諾可透過LED陣列做出微笑、悲傷和平常狀態等多種表情。而另外一個重要的關鍵就是頭部要能做出動作,因此在頸部上設計了一個兩自由度的運動平台,可以控制頭部的左右轉與俯仰,其中使用的是RC伺服馬達來進行位置控制,使頭部可以進行靈活的轉動與俯仰等動作來面對與其互動的對象。

█ 人形機器人的表情
手臂:
為了使尼諾不只長得像人,更要有靈活的動作表現,因此兩隻高自由度的手臂是不可或缺的。有了靈活的手臂就可以在人類的生活環境中進行複雜的任務操作或是肢體動作的呈現。因此尼諾在手臂的設計上採用了每隻手臂各有6個自由度的構造,其中分別在肩部、肘部和腕部各有兩個自由度的配置,如圖 (a),這種設計是基於分析人類動作並且找出最小所需的自由度配置而來,這樣一來便可以達成靈活動作的最低需求,並且不會增加太多設計難度以及機構負載。
而在關節的機構上我們也設計了一種雙軸垂直相交模組化致動器(Vertically Intersected Dual-Axis Modularized Actuator System),運用在人形機器人的機械手臂上,如圖 (b)所示。這種致動器內建兩個獨立的關節系統,軸的方向為垂直相交,讓設計者可以容易地進行手臂自由度的配置與設計,同時為了模組化,方便安裝使用,除了馬達和減速機以外,我們也整合了分散式的馬達控制驅動電路與通訊模組在其中,充分利用了機殼內的剩餘空間。在模組化致動器的外觀設計上,採用了圓柱狀的設計也是為了能模仿人類手臂的外型。這類模組化的設計讓手臂在拆裝與維護上更加方便。但是加裝外殼之後對於機構與散熱都是一大挑戰,因此在規劃機構時,就必須先考慮到需要保留多少的內部空間來擺放控制板,並且預留額外的線路,以避免執行動作時因線路過短而拉扯線路造成損壞,而在散熱方面,在每組機構中都有加裝風扇來協助驅動馬達的散熱。
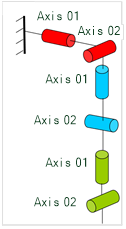
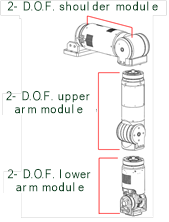
█ (a) 手臂自由度架構 (b) 三個模組化致動器的組合方式
下半身:
下半身主要包含了軀幹和雙腳,是尼諾的核心部位,主要負責機器人整體的運動,以及主要控制系統的裝載。雙腳的部分主要是由每腳6個自由度所構成,以達到最低需求的運動能力,其中髖關節為3個自由度正交共點,膝關節為1個自由度,踝關節為2個自由度正交共點。而軀幹部分也有設計兩個自由度的腰部,讓機器人可以進行旋轉與前後俯仰的動作,如圖 2 (b)。主要機構的部分皆由鋁合金構成,馬達驅動系統則由較大的直流伺服馬達加上皮帶輪和高減速比的諧波式減速機組成,足以達成高負載的操作。
由於雙足步行是一個高度非線性的控制問題,因此機器人需要許多不同的感測器資訊迴授給控制器以維持平衡,像是腳底的六軸力規和腰部的慣性量測裝置等就特別的重要,可以讓機器人知道目前的平衡狀態以及估測身體質量中心的位置。而為了能知道外界環境的狀況來進行步行,身上也裝有雷射範圍掃描器,可以知道周圍環境的距離,讓機器人可以規劃可行的行走路線。並且為了能讓機器人獨立於環境中行走,身上還裝有24V和48V的大容量鋰鐵電池,足以負擔全機運動時的消耗。而機器人的主要控制電腦也是裝置在背包中,來對於全身其他的分散式控制器進行控制。...待續
點閱人數