文、圖◎黃漢邦教授、詹澤鋒同學
控制系統:
尼諾全身的自由度極高,因此對於即時控制系統的選擇也非常重要,而為了減少控制線路的複雜度和重量,控制器的通訊方式也最好能夠串連。如圖所示,全身的主要控制主要是依賴背在身上的一台高效能PC,主要的控制演算法都寫在上面運行,並且可由使用者介面進行操作,接著使用USB和網路線與上半身和下半身的控制器進行通訊。
上半身的部分主要是採用可串連的CAN-Bus的通訊協定來進行傳輸,藉由自製的16位元dsPIC分散式控制器來對手臂、手掌以及頭部的馬達進行同步控制並且回傳感測器資訊,可以達到每秒200Hz的精準位置控制。而下半身使用的是最新的EtherCAT傳輸協定,結合馬達控制器,同樣可以達到每秒200Hz的精準位置控制以及感測器資訊的更新。
在機器人的運動控制部分,分為以下幾個部分:
- 軌跡產生器:為了使機器人能穩定行走而不傾倒,我們必須要使機器人在行走時的ZMP落在腳底的支撐平面上,因此根據期望行走的方向與距離,我們必須要適時安排ZMP的軌跡在可接受的位置。
- 控制器求解COG位置:在有了想要的ZMP位置後,我們還需要知道機器人身體姿勢該如何安排,因此我們藉由較為簡化的機器人動力學模型可以得到機器人的重心位置。而藉由我們所設計的LQSI控制器可以得到ZMP與COG的關聯性。
- inverse Jacobian的逆運動學求解器,便可以將實際所需要的空間關係轉換為各軸旋轉角度。
- CANbus及EtherCAT等介面連接溝通,可以下達預期的旋轉角度讓控制器去追蹤,也可以將馬達上的編碼器等感測資訊回傳電腦進行後續處理,每秒控制頻率高達200Hz~1000Hz。
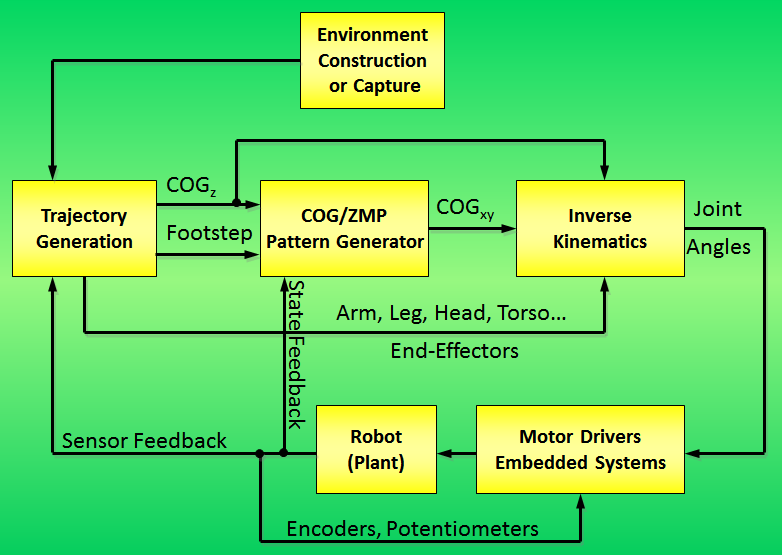
█ 尼諾運動控制架構
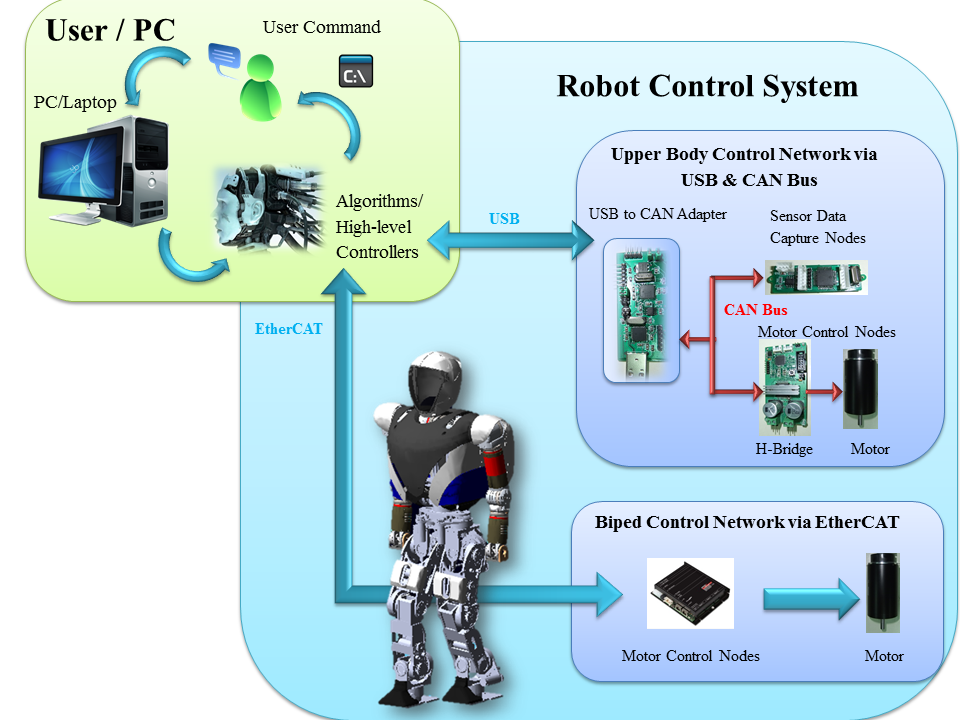
█ 機器人控制系統架構
應用:
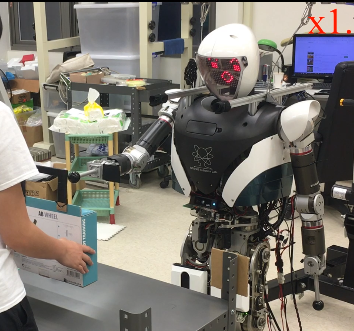
透過演算法的開發,我們可以讓機器人實現多種任務和功能。裝上手掌後,尼諾可以進行手語表演,如圖 7所示。另外,搭配額外的控制演算法,可以讓機器人搬運重物、走上崎嶇路面、抵抗外力。
另外,也有開發出能讓尼諾型走樓梯、走斜坡的方法。
█ 尼諾進行手語表演

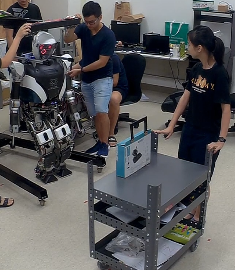
█ (a)尼諾推推車,上面放了10公斤重物

█ (b) 手持兩公斤重物
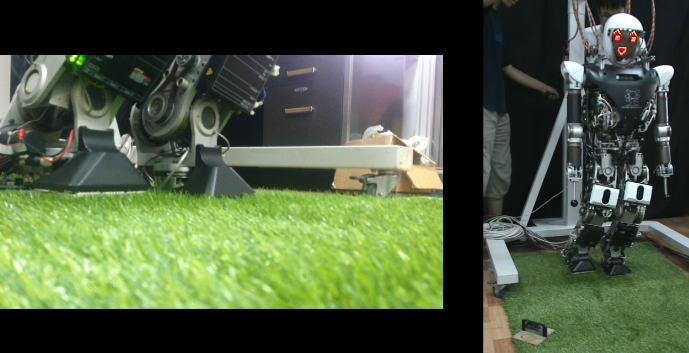
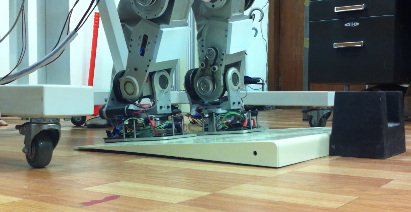
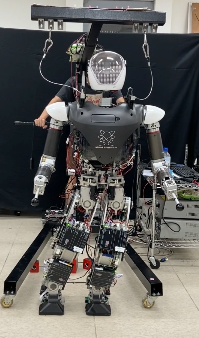
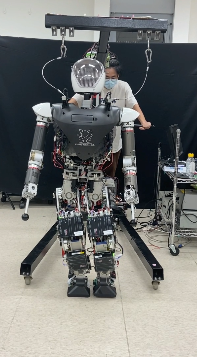
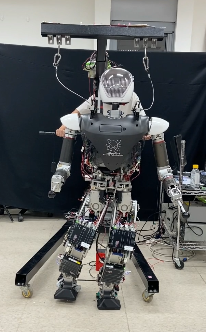
█ (a)尼諾行走不平整路面 (b)行走草地
█ (a)行走斜坡
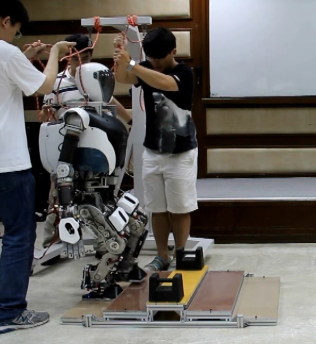
█ (b)行走階梯
█ (a)利用視覺導航走向目標
█ (b)用視覺追蹤要抓取目標的位置
近期開發出新的QP控制器,透過動量控制機器人的穩定,並使用二次規劃(QP)來最佳化每個關節該到達的角度,來完成做出動作和保持平衡的任務,也可以根據需求加入其他條件來達成任務。而加入視覺的功能及特定的導航相關演算法,尼諾也能進行導航和軌跡路徑的規劃,如圖 11。透過和音樂的結合,以及特定舞蹈動作的規劃,尼諾也可以進行舞蹈的表演,如圖 12所示,並且能透過神經網路將聽到的音樂分類並做出相應的舞蹈動作,且跟上節拍。另外,近期透過視覺研發出模仿規劃的方法,可以進行複雜的全身動作規劃,並且模仿影片中的人的動作,大幅簡化複雜動作規劃的麻煩。

█ 12 NINO舞蹈的截圖
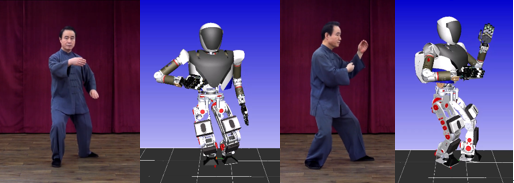
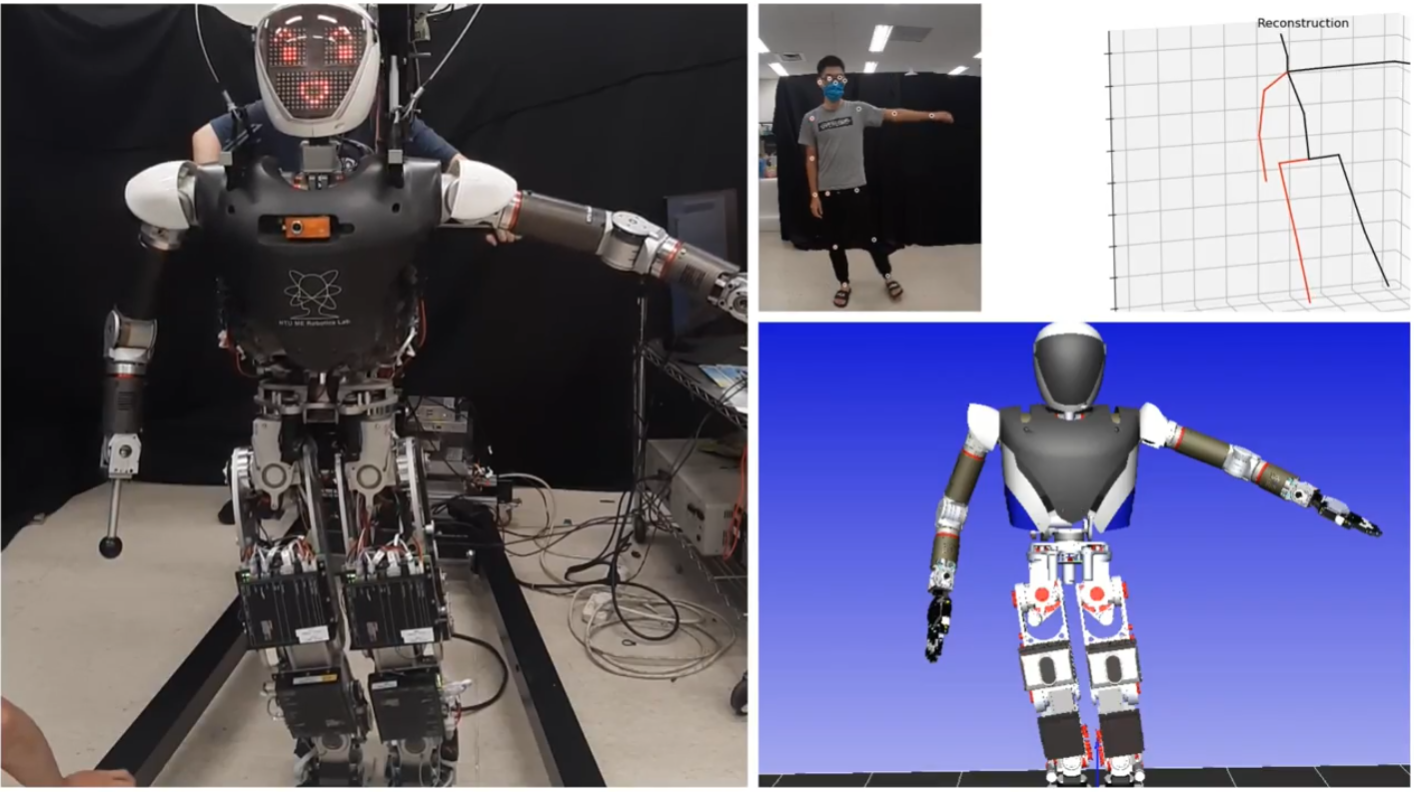
█ NINO 的動作模仿
未來展望:
有鑑於人口的高齡化,以及機器人未來必定會用在人類生活以及服務人類,我們近期積極研發和老人照護、人機互動相關的功能,通過改進人形機器人的感知能力和行為模式,以及設計出更好的演算法,我們希望能夠使機器人能夠更好地幫助老年人照顧自己,並且在人機互動方面更加自然和順暢。
近期,各大科技公司和研究機構也都在努力研發新一代的人形機器人,希望能夠在服務人類的同時更好地解決一些長期存在的問題。例如,Boston dynamics的人形機器人 Atlas 在運動能力方面有了顯著提升,環境中穩定地行走、跳躍,甚至進行跑酷和跳舞表演。而特斯拉也提出人形機器人 Optimus,想要真正讓機器人能幫助人類完成工作任務,並且希望降低生產成本讓機器人進入生活。人形機器人Ameca擁有極度仿真人的臉部以及細微的臉部動作,朝向如何更像人類的方向努力。
在未來的發展中,我們將繼續學習借鑑這些最新技術的優點,並將繼續努力探索如何讓人形機器人在其他領域中更好地服務人類,並且,我們將朝向演算法優化、控制方法優化、機構改善等方向前進,以便使我們的人形機器人在運行效率、操作精度和耐久性方面得到進一步提升。我們相信,隨著技術的不斷進步,人形機器人將會在未來扮演越來越重要的角色。
點閱人數