"IROS"(International Conference on Intelligent Robotics and Systems)與"ICRA"(International Conference on Robotics and Automation)為國際間兩大機器人會議,很幸運地獲得今年IROS會議的肯定,可以在位於東京台場的"Tokyo big sight"參與文章的發表,讓我可以體驗這一年一度的機器人盛會,在2013年的11月3日至8日渡過充實而難忘的學術之旅。這是我首次參與大型的國際研討會,在很多方面都是第一次的體驗,從中也了解與學習到很多的經驗與知識。當然,對我而言最大的挑戰就是15分鐘的發表時間,包括了12分鐘的演說與3分鐘的問題討論,從事前的準備到當天的發表,過程中增進了不少英語表達與演說的能力以及簡報製作的技巧。
"IROS"(International Conference on Intelligent Robotics and Systems)與"ICRA"(International Conference on Robotics and Automation)為國際間兩大機器人會議,很幸運地獲得今年IROS會議的肯定,可以在位於東京台場的"Tokyo big sight"參與文章的發表,讓我可以體驗這一年一度的機器人盛會,在2013年的11月3日至8日渡過充實而難忘的學術之旅。這是我首次參與大型的國際研討會,在很多方面都是第一次的體驗,從中也了解與學習到很多的經驗與知識。當然,對我而言最大的挑戰就是15分鐘的發表時間,包括了12分鐘的演說與3分鐘的問題討論,從事前的準備到當天的發表,過程中增進了不少英語表達與演說的能力以及簡報製作的技巧。
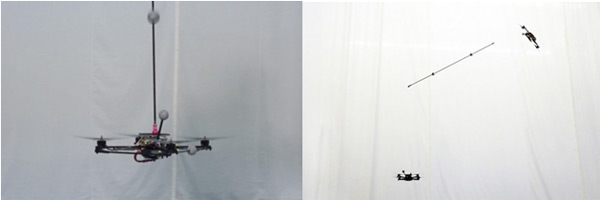 |
| █ Pole balancing and acrobatics of quadrocopter,Institute for Dynamic Systems and Control,ETH Zurich 。 |
參加國際研討會除了發表最新的研究成果之外,無非就是藉此機會去了解在自己的研究領域,各學校或各團隊的研究方向與進展,從中學習並獲得研究靈感。
聆聽研討會可是個有趣的經驗,八百多篇的文章被安排在一百五十幾個主題中、分作三天每天24個時段,而每個時段同時都有13個演說在進行著,而每個人就跟跑大地遊戲一樣,依照自己的喜好或是研究的領域找主題聆聽。三天下來聽了各式各樣的主題,雖然非常的疲憊(聽英文報告的疲勞程度真的是遠大於聽母語)卻是收穫豐富。
 |
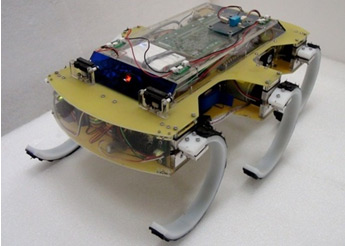
| █ TITAN-XIII,Tokyo Institute of Technology 。 |
這次的會議中聽了許多關於飛行機器人的研究,雖說這方面與我的研究領域較不相干,但基於好奇心還是聽了不少當作增廣見聞:德國航空太空中心(DLR) 透過視覺系統辨認跑道位置並利用GPS的資訊作降落策略的判斷,作出無人航空載具(UAV)的自動降落系統(Automatic landing system); 而令我印象深刻的是蘇黎世聯邦理工學院(ETH Zurich)D'Andrea教授的團隊在四旋翼直升機(Quatrocopter)上各式各樣的控制與應用,在控制上可做到四旋翼機器人精準的狀態控制(位置、速度、加速度)並加以應用在許多地方,如:搬運具撓性的環狀負載同時防止其發生形變與彎折、以四旋翼拉動繩子製作可拉伸結構、以及用兩台四旋翼機器人作棍子的互相拋接(pole acrobatics)並平衡,回國後也看了許多他們實驗室關於四旋翼機器人的影片,感覺都可以組一個四旋翼馬戲團了。
各式機器人研究 各國競技交流
而在與我研究主題比較相關的足式機器人動態分析與控制策略部分:在機器人設計上,有東京工業大學的Shigeo Hirose團隊最新一代的四足機器人"TITAN-XIII";加州柏克萊大學(UC, Berkeley)Ronald Fearing團隊的各式各樣的超小型六足機器人(身長約10cm),雖然無法搭載太多的感測器與執行複雜的演算法,但卻有靈活運動以及易於設計與改裝的優點;麥基爾大學(McGill University)Gregory Dudek團隊關於六足機器人「忍者腳」的設計,讓RHex機器人的半圓形腳可以同時達到路面行走與水中游泳的功能。在控制策略方面:瑞士的洛桑聯邦理工學院(EPFL)團隊以「Central pattern generator (CPG)」的架構為控制基礎,並利用類神經網路作閉迴路控制,讓四足機器人在崎嶇的路面上穩定行走;
 |
| █ Ninja Leg,Centre for Intelligent Machine,McGill University 。 |
佛羅里達州大(Florida State University)的Jonathan Clark團隊研究線上調整腳部彈性的適應性控制,可應用於機器人行走於未知軟硬的地面時的動態控制;蘇黎世聯邦理工學院(ETH Zurich)的Roland Siegwart團隊則是運用狀態估測器,偵測並消除足機器人在運動時遭遇到地面的不平整與打滑的狀態。
 |
| █ Gimball,Laboratory of Intelligent System, EPFL。 |
而在模型分析上,我們(Bio-inspired Robotics Lab)提出了一個可以充分描述半圓形腳動態特性的"Rolling SLIP model(R-SLIP)",以此模型做為控制RHex機器人之"template",並加上閉迴路控制增加機器人之動態穩定性;類似的想法有德拉瓦大學(University of Delaware)Ioannis Poulakakis的團隊,他們研究具有腰部被動彈性自由度的"bounding model",描述機器人或是動物在運動時,腳與身體的彈性機構之間的協同,並提出控制策略。
機器人界先驅BDI
創辦人演講精彩接著,會議中還有一項活動是非常值得參與的,就是安排在每天一大早的大演講(plenary talk),每場都是邀請到各領域的佼佼者來與大家分享研究的想法與成果。三場演講之中,其中一場由Boston Dynamics (BDI)的創辦人Dr. Marc Raibert的演講"Dynamic robots:Mobility, speed and dexterity"與我研究的領域最相關也最具啟發。
DI在機器人動態分析與控制上可說是世界的先驅,我開始接觸機器人領域是在大三下學期,在林沛群老師的BIOROLA (bio-inspired robotics laboratory)實驗室當專題生研究球型機器人,打從那時起,就欣賞了不少BDI放在YOUTUBE上的酷炫機器人影片。
藉由這次難能可貴的經驗,讓我更加了解BDI在動態機器人的發展脈絡與想法,"BigDog"是一具有在崎嶇環境中行走與跑步的四足機器人,目標是在學習自然界中的動物,可以在各種自然環境中靈活的運動,從"BigDog"為出發點,"LS3"大幅降低機器人運動時的噪音、增加了機器人的負載(400lbs)與耐久性,並且具有跟隨功能(follow the leader gait),"CHEETAH"的目標則是放在完成高速動態的,設計靈感來自於獵豹且增加了腰部的自由度,而近期發表的"WildCat"則是將原本只能在實驗室的跑步機做二維動態模擬且致動裝置不在機器人身上(off-board)的"CHEETAH"的實現版,"WildCat"可以在野外進行bounding與gallop步態。研究動態機器人的最終目標就是讓機器人可以跟自然界中的動物一樣,能夠在崎嶇多變的環境中靈活的運動,這其中包含了「感測」、「演算」與「運動」,如何將這些技術整合是一大關鍵,而我認為BDI之所以能如此強大有幾個關鍵:機構上有強而有力的致動器(hydraulic actuator)、控制上以簡單的模型描述相對複雜的運動、設計上相對於身體非常輕的腳,讓腳的動態不影響身體以確保模型的正確,最後當然還有龐大的資本與強大的團隊!
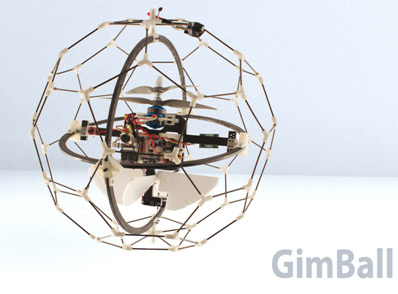 |
| █ Gimball,Laboratory of Intelligent Systems,EPFL 。 |
機器人展大飽眼福完整生產線秀出來
拜這次的IROS會議與國際機器人展IREX(International Robot Exhibition)合作之賜,會議結束後的三天還可以留下來欣賞機器人展,可說是非常棒的體驗。
展場上簡單的看了:現在正夯的3D列印技術、各式各樣的氣壓致動器、線性滑軌、管路探勘機器人、以及面臨老年化社會的來臨,各種的看護相關的智慧型設備。機器人方面有洛桑聯邦理工學院(EPFL) 的球型飛型機器人"Gimball",Gimball的特色在於用外殼的機構設計達到內部自穩定的效果,讓飛型機器人可以在複雜的環境(ex:叢林)中飛行而不受干擾。
而展場中最大宗的產品就是各式各樣的工業用機械手臂了,從外型上可分為三類:"Puma arm"、"SCARA"和"Delta arm",Puma arm相較於SCARA而言外型較適合工廠的加工環境,所以佔大多數,而Delta arm多半是在處理非常快速的作業。而功能上也是各式各樣,除了最常見的工件夾取之外,還有可以裝在身上當輔助動力的手臂、可以完成簡單加工程序的輔助手臂、以及裝載在車體上的手臂,配合雷射感測器與相機可以做出很多很多的工程應用......等。
 |
| █ FANUC (發那科)。 |
 |
| █ Kawasaki (川崎重工業)。 |
 |
| █ 林沛群老師(右)與黃群凱同學(左)於會場門口合照。 |
幾家工具機與重工業大廠甚至是不惜成本的搬來了整條生產線來展覽,真是大飽眼福。
FANUC (發那科)。 Kawasaki (川崎重工業)。
這趟IROS日本之旅的收穫多到難以一一細數,會議中學到的不只是工程上的知識,還有開拓的視野與國際觀,是一趟充實且有趣的旅行。最後,當然就是趁著難得出國參訪的機會,體驗不同的文化,都市叢林中的城市美學、密如血管的地鐵網絡系統、高度自動化與現代化的生活機能、日式傳統文化與建築以及道地的日本料理,都為這趟學術之旅增添了不少人文風采。