機械工程實務氣動車 冠軍有感
2016年本系傑出系友 王正平 趙亦中 吳宗信
歡迎系友投稿或提供意見 連絡方式: meoffice@ntu.edu.tw
點閱人數
今年5月15日中華民國自動機工程學會(SAE TAIPEI SECTION)於車輛測試研究中心(ARTC)第二度舉辦自動駕駛車示範賽,除了去年參賽的隊伍,包含臺大、中山大學與ARTC,今年更多了成功大學一隊參賽。臺大團隊主要由本系李綱老師實驗室研究生鄭力瑋、蔡育伸、王俊凱、吳明軒、吳柏富、劉耿豪、侯翔文、林舜友組成,並有多位鄭榮和老師主授之智能動力電動載具課程之大學部與研究所學生參與車輛之改裝及測試工作。
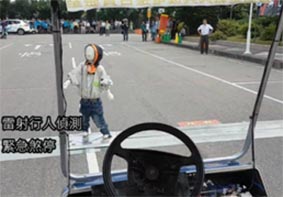
自動駕駛示範賽 通過層層關卡 今年的自動駕駛示範賽總路程約為去年的兩倍以上,情境也較去年複雜:第一關是雙車道變換(double lane change)以閃避前方障礙物,當自動駕駛車偵測到前方車輛與自身相對速度低於一定值時,則進行車道變換,超越該車後再次回到原有車道上;第二關是道路縮減,由三角錐構成的道路兩側邊界寬度由3.6米漸縮至2.2米,自動駕駛車必須保持於漸縮之車道中心線附近而不碰撞到兩旁的三角錐;第三關為九十度過彎,而後自動駕駛車將行駛進入GPS訊號不良的環境中,在此路段當中,其他參賽隊伍車速大幅降低或甚至發生迷航的狀況,唯獨臺大團隊的自走車透過sensor/data fusion技術,即使在GPS失準的情況下,仍能保持原有車速準確控制自走車於車道內行駛;第四關是自動偵測行人與煞停,在接近終點時,會有一個假人不預期地從側邊衝出至車道中,而自走車必須在偵測到前方障礙物為行人時緊急煞車;最後一關則為路邊自動停車,自走車必須在終點時,自動將車輛停靠於路邊的停車格內。 由於經費有限,今年臺大團隊仍舊延用去年使用之電動高爾夫球車參賽,但是本的自動駕駛車是四隊當中速度最快的一隊,比使用轎車進行改裝的ARTC自走車行車速度還快。臺大團隊果然不負眾望,以最短的時間順利完成每項大會規定的駕駛情境考驗,參賽同學們最後獲得SAE頒發獎金與完賽證明。
了解產業需求 結合理論實務為上 目前國外頂尖大學與車廠的自動駕駛技術研發已漸漸由慢速行駛的robot car發展至更講求vehicle dynamics的高速自動駕駛,乃至於自主駕駛賽車研究。國內在自動駕駛方面的研究資源仍非常不足和落後,並仍停留在robot感測/感知與定位運動控制技術的延伸,忽略vehicle dynamics的重要性,與車廠的技術發展需求並不是非常一致。唯有深入了解產業界的技術需求,進而將學校的理論研究和實務結合,協助產業界解決技術研發上的困難,並培育業界需要的人才,方能使國內的產學界資源緊密結合,達到雙贏的局面,並提升台灣整體的國際競爭力,這也是本系李綱老師一直以來所追求的目標。
地址:台灣台北市106 羅斯福路四段1號工學院綜合大樓508室 電話:(02)3366-2744 傳真:(02)2363-1755 mail:meoffice@ntu.edu.tw
Department of Mechanical Engineering, National Taiwan University