2017法蘭克福車展 全球愛車人盛會
工學院理論基礎結合 動手實作系列總整課程 展現學習成果
歡迎系友投稿或提供意見 連絡方式: meoffice@ntu.edu.tw
點閱人數
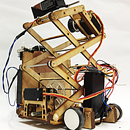
這次機械設計是一個新的主題,雖然可以從網路依據需要的功能找到相應的設計,經由分門別類後篩選出較容易製作及符合尺寸要求的機構,但如何實際去選擇合適材料、決定能運作的尺寸、製造、組合都需要仔細考慮。我們剛開始就決定想要做和大家不一樣手臂式升降,但那時只有用相當簡單的厚紙板做模擬,且並沒有完整考慮所有應配合的事項,比如說車體配重、馬達扭力等等,當然也有很大的原因是並沒有人接觸過馬達的規格及控制,但當我們在認為自己接近完成時,才發現犯了許多致命的錯誤。
跳脫框架 多方收集檢驗 在設計前期的那幾個月,設計製造修正設計製造修正的反覆循環中,我們一開始總是習於紙上談兵,並以為一切都會順利,實際製造出來才發現設計漏洞百出,想要以小小的修正彌補這些漏洞,內心抗拒也害怕「這個設計或許不可行」的想法,卻越補洞越多。後來發現,完全擺脫掉既有的思維去思考,並多收集各種機器人作品,或許會有截然不同的靈感跳出。 邊做邊修正是很正常的,由於經驗仍不足,一開始的設計沒辦法一下就達到完善,先做出一個粗略的功能性測試十分重要,這是我們前期沒有做好的,其實只要花一點點時間,就可以有階段性的測試成果,這些測試成果也可以增加製作過程中的樂趣與成就感。
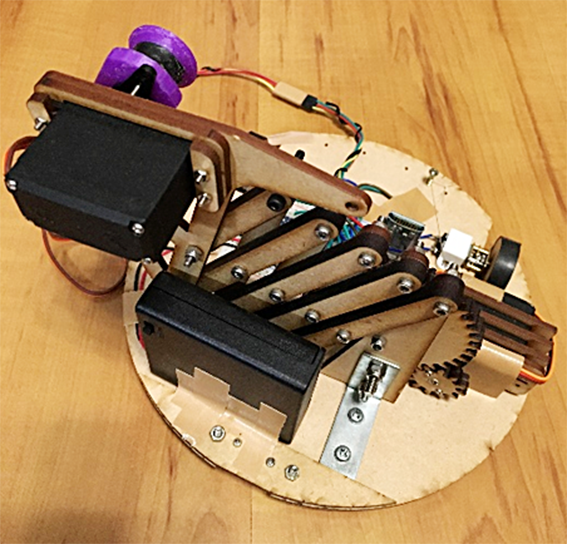
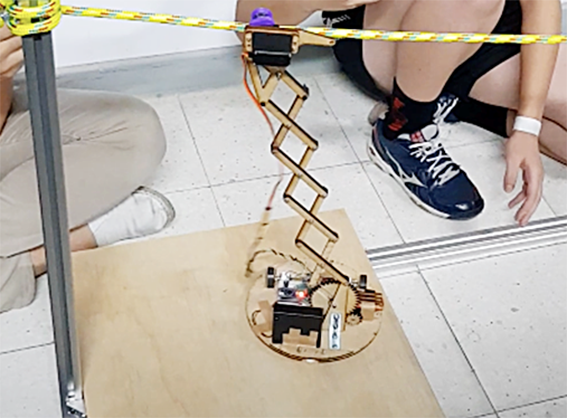
不斷思考 何者必要與堅持 在接近成果發表的前一周,我們做了整個學期最重要的決定,就是再次審查爬繩機的總體設計,並且去蕪存菁。在此之前,本組的期待是製作出一台功能完善且與眾不同的機器。我們希望爬繩的機構能穩定地抓住繩子,於是製作出了有開合功能並能精準咬繩的爬繩機構,但如此的設計卻導致機身的重量過重,無法滿足整體高度低於十五公分的要求,並且使用了超過三個伺服馬達來使機構運轉,使得爬繩機的供電需求大增;我們希望可以跳脫大家一貫的X行升降機構,於是執著於手臂設計,但由於馬達的扭力與尺寸的限制,手臂設計並無法舉起應有的重量,而增加扭力在已經使用許多馬達的情況下,電流過大又變成另一項嚴重的問題。能力的不足加上時間的緊迫,我們不得不重新開始思考,對於這台機器,什麼是必要的設計,而什麼其實是多餘的堅持。於是我們先面對了整台機器最大的問題,就是重量過重導致升降機構上不去。面對這個困擾,我們決定大刀闊斧地拿掉咬合型的抓繩機構,只留下滾輪的爬繩機構,但失去抓繩機構的同時,也就代表我們的升降機構與地面移動的機構必須擁有更多的控制精準度,才能補償我們抓繩的不足。然而歷經多種X形升降機構製造方式測試卻都無法克服理論上無窮大的起始力,最後在鄰近測試期限時,終於設計出結合手臂和X形機構的綜合方案,而在考量馬達規格及尺寸限制後,也是在多次測試後增加齒輪才符合要求。
脫穎而出 感動的瞬間 經過這樣的改革,我們最終版的爬繩機透過整體設計的輕巧性與X型機構與手臂打造出的升降精準度與快速相互配合,同時又保有我們所堅持的獨特性以及創意,使我們在比賽中脫穎而出。 回想學期初剛拿到題目,茫茫然了好幾個星期,這些摸索,有些虛度但也有所收穫。期末的衝刺大家努力在密密麻麻的考試夾縫中求生存,最後把難產的爬繩機送上了測試平台,到達終點線那瞬間,覺得很累,但真的很感動。
全組成員: 地質四 粟滙潁、機械三 賴怡穎、機械三 謝欣芳 機械三 吳艾庭、機械三 黃元貞、機械三 林小萸
地址:台灣台北市106 羅斯福路四段1號工學院綜合大樓508室 電話:(02)3366-2744 傳真:(02)2363-1755 mail:meoffice@ntu.edu.tw
National Taiwan University Department of Mechanical Engineering