Speech title: The utility of solid and fluid geometries in insect and bird flight research Keynote speaker: Richard J. Bomphrey 第一天的keynotespeaker來自英國倫敦大學 Bomphrey ,分享其研究成果,由於實驗技術跟電腦模擬進步,仿生飛行已有重大突破,該實驗室透過電腦模擬及高速攝影機協助,觀察出蚊子的飛行動態,並實際設計了訪蚊子的微型飛行器,在動物方面針對老鷹飛行實施觀察,並透過實驗設計而加以陣風,來了解老鷹如何透過改變翼展方向,來適應不同氣流,並藉以用在機構改善,此次該研究成果是透過不同機構的合作包含生物學家、機構學家等,最後該講者認為透過對動物流體力學的認識加上技術的突破,已有能力將生物資訊轉換成工程來實現。
Speech title: Ants rafts and maggot flows Keynote speaker: David L. Hu 講者來自喬治亞理工學院,也是搞笑諾貝爾獎的得主,所謂的搞笑諾貝爾獎(英語:IgNobel Prizes),又名幽默諾貝爾獎,是對諾貝爾獎的有趣模仿。獲獎成就「低俗、下流;卻又是一種社會批評,諷刺地揭露出荒謬的現象;並且是有用的研究和知識。」。這次的報告主題也非常特別,研究螞蟻群聚時的物理現象,有些螞蟻會有群聚現象,當上千萬隻螞蟻群聚成球形時,會有類似於一般材料的特性,當施力壓牠們時球狀會被壓縮但一會後就會恢復原狀,因此可以量測其彈性係數,另外當將牠們放置於水中時,會逐漸從球狀擴散成一個圓形平面,將牠們下壓時,甚至可以藉由彼此的拉扯而形成一個類似薄膜的應用,可以抵抗水面張力而不會下沉,透過對生物的觀察,或許可以運用在材料設計的構想上。
Speech title: Light driven bacteria as remotely controllable propellers for micro-engineering applications Keynote speaker: Roberto Di Leonardo 主題是微生物運用的部分,算是平常比較少接觸到的領域,透過設計光照機制來調控鞭毛蟲單細胞生物的運動,藉以推動微型推進器,微型推進器的具體運用較未詳細介紹,主要是講解如何去透過微生物對光反應的特性去控制牠們的運動,當中存在許多技術性需突破的地方,如何讓各個獨立個體同步運動,以達到所需之轉矩等,藉由講者的介紹,讓我對這個領域有了初步的認知。
Speech title: Skin of sea cucumbers: the smart connective tissue that alters mechanical properties in response to external stimuli Keynote speaker: Tatsuo Motokawa 生物的許多特性真的是很奇特,如果能研究分析其特性背後原因,可以拿來運用到生活中或是工程上之運用,本次研究者的研究對象是海參,海參是軟體動物,但在受到外在刺激時,會變得很堅硬,講者之所以選擇海參為研究對象是因為他很好奇,像這樣的生物幾乎沒有什麼防護機制,是如何抵抗外在威脅,而主要原因有2個,一個就是改變身體的剛性,另一個則是受到刺激時會分泌毒液,而研究者主要是好奇像這樣收到刺激可以改變身體剛性的機制是否可以拿來當作智能材料的研發,而經過研究發現海參之所以會變得剛硬是一種CCT締結組織的影響,前人認為是該締結組織中的肌肉所導致,但是後來研究發現有些海參即使CCT中不含締結組織仍然會變硬,才知道是CCT中的膠原蛋白所致,最後講者還將他在研究中對海洋生物的觀察填詞寫歌,也讓我學到,唯有將研究融入生活或是當成興趣,才能享受研究。
Speech title: Dynamics and locomotion of flexible foils in fluid and frictional environments Keynote speaker: Silas Alben 藉由像蛇或是魚身體彈性且柔軟的身體在水中或陸地的運動方式已經被研究許多,但是並未被詳細的解釋,本研究透過分析及模擬的方式,並藉由參數調整來控制其運動,發現當身體開始擺動時,在某些擺動頻率下會有共振發生,當共振發生時也會影響功率之需求,而有較差的效率表現。我認為透過生物觀察而得到其相似的運動模式,並透過數值模擬或實驗驗證是做仿生研究大致上的研究方法,但礙於生物是活的,所以常常不是如預期般的運動或是好拍攝,必須花時間設計實驗,但觀察時間太長,生物活力也會減低,進而影響觀察,如何在生物觀察中有良好的生物啟發,是每個研究者的挑戰。
Speech title: Development of the Osaka University squid-like underwater robot Keynote speaker: Yasuyuki Toda 研究主體主要是介紹講者自行開發的仿魷魚機器人,而透過數值模擬及6自由度方程式的運動預測,不斷修正其運動軌跡,目前已開發至第6代,為什麼選擇魷魚當作設計主題呢?說到魷魚,幾乎所有人都首先想像一下噴射推進。但是在日本餐廳或水族館的水箱中觀察魷魚的游泳風格,他們通常不會用噴射推進游泳,而是起伏的側鰭游泳。他們的游泳風格具有一些優點,如精確的運動控制能力,包括運動停止能力和低頻聲音噪音。我們認為此功能可用於需要精確運動的水下航行器,例如海底搜索。講者分享了許多測試時的影片,說明其所設計的仿生機器人,可以有不同的運動模式,可以前進、後退、轉彎、下潛等,透過對生物的觀察及數值模擬、設計實驗,最後達到機構設計,一系列的過程是工程的具體實現,令人印象深刻。
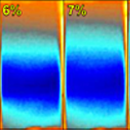
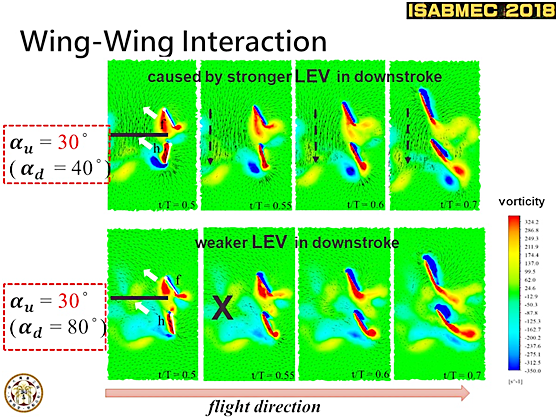
Speech title: The effect of vertical gusts on the flow field near insect-size flapping wings Speaker: T. Jakobi 而在其他講者方面,有幾位作者的演講主題,讓我有所啟發,首先是探討陣風對昆蟲飛行的影響,目前大多數的研究都是討論靜止流場,較少討論外在環境有所改變時,但仿生飛行器的運用必須考量在真實環境,因此像這類的研究是有其必須,而該研究表示,當陣風由上往下吹時,LEV的貼附易受影響,進而影響升力表現,身體的上下起伏較大,相反地,陣風由下往上吹時,則對升力有所助益。參考其研究,未來或許也能在模擬或實驗設計中加入陣風影響,探討飛行穩定性。
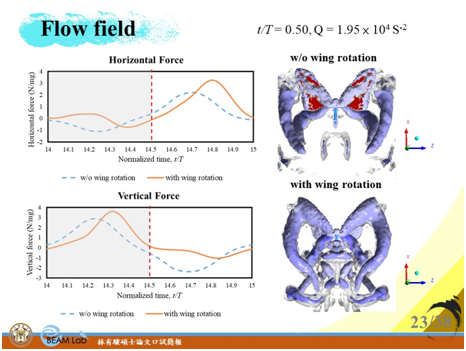
Speech title: The dynamics of bumblebee wing pitching rotation: wng morphology and inertial properties Speaker: Dmitry Kolomenskiy 本研究主要是探討蜜蜂在飛行時翅膀的旋轉效應,比較特別的是一般研究會將翅膀當作均質材料來探討,但本研究依照翅膀翅脈結構將其分成多等分考量其密度分布及翅型而計算出較接近真實的翅膀慣性矩及面積等,做為模擬輸入的條件,而模擬結果也與實驗類似,在近期研究中已經開始考量翅膀質量對飛行的影響,甚至也會探討慣性力矩的改變,因此在之後的研究中,應將空氣力矩及慣性力矩列入考量。
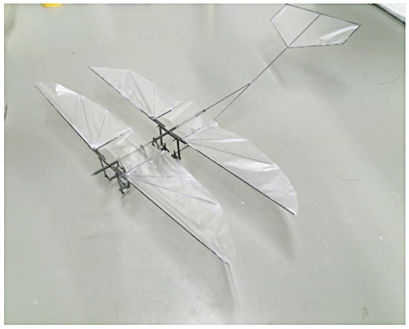
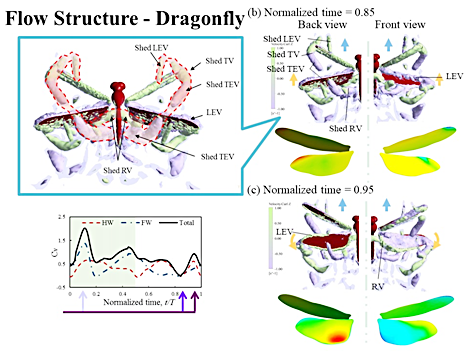
Speech title: Aerodynamic characteristics and the flow fieldby the phase difference of
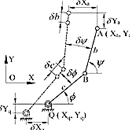
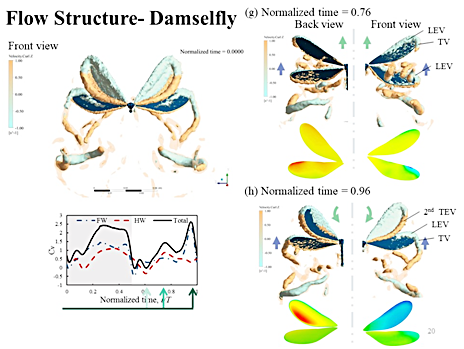
the dragonfly wings Speaker: Shinichiro ITO 眾所周知,空氣動力學特性根據蜻蜓的前翼和後翼之間的相位差的不同而不同,但原因尚未闡明。 通過製作機器人蜻蜓,通過可視化闡明了由於相位差的差異引起的空氣動力學特性的變化。本講者主要是透過MAV製作來說明相位差的影響,然而目前僅驗證了其機構與真實蜻蜓有相似動作,尚未進一步討論流場現象。 我們實驗室也有3名碩士班學生參與口頭報告,題目分別是豆娘不對稱拍翅動作與飛行操控研究、翅膀相位差對豆娘與蜻蜓懸停策略之影響以及翅膀旋轉動態對蝴蝶飛行操控影響,本實驗室一直致力於研究昆蟲飛行,將昆蟲的飛行特色應用於微飛行器的機構設計與飛行操控,實踐仿生工程(bio-inspiredengineering)精神,提供理論基礎與技術分享,而這次參與研討會也是成果的展現。