小小機械營 啟蒙小小工程師
小畢典演講嘉賓游志源博士:創造被使用的價值
懸浮液滴共振頻譜上 失落的拼圖 Part 2
愛因斯坦培植計畫 (1)
我的音樂人生
歡迎系友投稿或提供意見 連絡方式: meoffice@ntu.edu.tw
點閱人數
連桿機構之運動學、尺寸公差與接頭間隙分析
科技部為鼓勵年輕學者多方面與自由嘗試各種發想,因此提出「愛因斯坦培植計畫」以補助計畫主持人能有足夠的經費與資源去發掘有潛力的新興議題進行探索。我所提出的「連桿機構之運動學、尺寸公差與接頭間隙分析」的計畫很幸運地在108年度獲得補助。
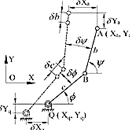
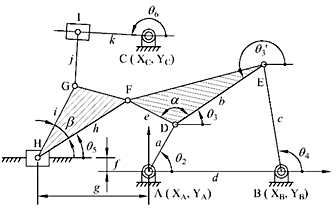
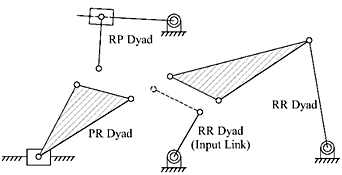
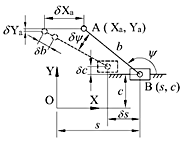
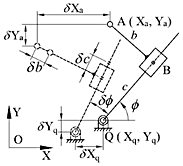
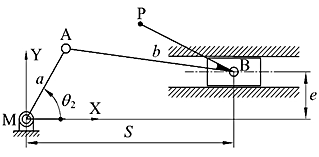
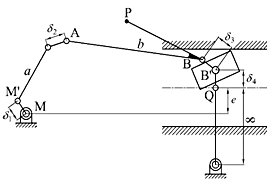
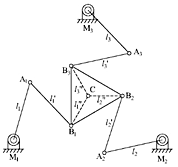
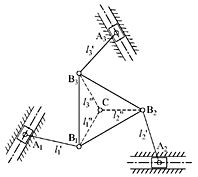
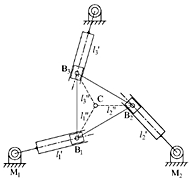
我所提出的研究主題包含四大階段。研究第一階段旨在系統性地改良連桿機構之運動學分析。連桿機構之桿件間以運動對接合後形成一封閉迴路。因此,進行運動學分析時,必須針對欲分析的連桿機構推導特定的閉迴路方程式。而本研究則是希望將閉迴路的連桿機構視作為若干個開迴路機器人的組合,並以此觀念分析各桿件的位移、速度及加速度。例如,如圖(a)-(d)所示的四連桿機構、滑塊曲柄機構、倒置滑塊曲柄機構與雙滑塊機構,若斷開輸入桿件與輸出桿件間相接的運動對,這些連桿機構其實可視作為開迴路機器人的組合。可組合成閉迴路連桿機構的開迴路機器人包含有RR機器人、PR機器人、RP機器人與PP機器人,其中R代表為迴轉對接頭,而P代表為滑動對接頭,圖(e)-(h)所示。此時,我們便能用開迴路機器人的順向與逆向運動學去分析這些四連桿機構。此外,對於六連桿以上的連桿機構亦可拆解成若干的開迴路機器人,並應用相同的觀念求解。如此一來,便無須針對新的連桿機構另外推導對應的閉迴路方程式,此舉亦可簡化數學推導的複雜度且便於編程於電腦程式求解。
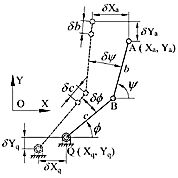
研究第一階段的運動學模型可同時作為後續有關尺寸公差及間隙對連桿精確度的影響之研究基礎。研究第二階段將同樣利用模組化的研究方法去評估當連桿的尺寸有誤差時,該誤差對輸出運動所產生的影響。
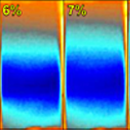
研究的第三階段則是要探討公稱輸出位置的不確定性。就工程實務之角度觀之,接頭間隙的重要性不亞於尺寸公差,二者均為造成連桿機構輸出精度降低之主因。本研究將選用在理論上或實務上具有代表性之連桿機構進行實例計算。
基於前三階段之研究結果,我們便能系統化全面性地進行精確的運動學、尺寸公差及接頭間隙分析,進而在設計時訂定合理的公差以減少製造成本,以及分析機械裝置是否能滿足運動精度的要求。為進一步擴張研究效益,使研究能同步強化教學及學習間的連結,本研究第四階段將著重在建構一套全新的教學法,利用圖像使用者介面整合計畫中所發展出的所有計算法,讓未來的運動學、尺寸公差及接頭間隙分析之教學與學習均更加簡易而有效率。
地址:台灣台北市106 羅斯福路四段1號工學院綜合大樓508室 電話:(02)3366-2744 傳真:(02)2363-1755 mail:meoffice@ntu.edu.tw
National Taiwan University Department of Mechanical Engineering