2018日本筑波大學交流計畫
顆粒流的惡趣味:(一) 微觀傳遞機制
深冬巴黎的Long Stay(下)
歡迎系友投稿或提供意見 連絡方式: meoffice@ntu.edu.tw
點閱人數
首先必須要感謝各位機械系策劃的老師,包括在臺大與筑波大學的老師們,以及系辦與所有曾經在過程中幫忙的人。這樣的交流計畫不僅對於個人,對於兩邊的實驗室或學校應該都是有幫助的。基本上來說,我認為這次的活動算是十分吸引人,除了獎學金十分優渥以外,相信大部分的同學除非交換,其實很難在大學期間到外校參與這樣形式的活動。 本次交換活動在2018 年 7 月 30 日 至 9 月 1 日進行,大致分為兩個階段,第一週以安頓生活與住宿空間,採買接下來的生活所需品為主,本次所住宿的一ノ矢宿舍算是校地的最北端,離市中心的南端有一定的距離,因此大部分餐食都是房間內自炊與宿舍的學餐解決;第二週則是進行電子推進(Electricpropulsion)的相關研究,由校內的博士生 Junkoさん所指導的針對以Xenon最佳化的霍爾推進器(HallThrusters),進行Xeono與Argon混合氣體作為燃料效率提升的使用研究。至於第三週部分則是日本當地的盂蘭盆節放假一週,大家基本上都是到處走走看看,再接下來的兩週,則是進入下一個主題的 Star Tracker 部分,整體來說對我比較算是一個比較沒有接觸過的部分,希望透過對於星空影像的辨識來做出能夠計算物體位置的演算法。
校地廣大 每日校園健走 筑波大學的校地十分廣大,具體來說大概是真的需要公車接駁往返的那種大小,本次住宿的區域如上所提是在北端,而上課、實驗室等等區域則是在中間的區域(如圖一),因此每天的往返走路大致需要半小時左右,不過整體來說還在能接受的範圍,至於腳踏車的部分有建議校方可以提供租賃服務等等,因為公車還是有末班車,如果在市中心吃飯較晚或是類似的情況可能會比較麻煩一些。
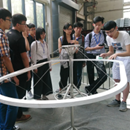
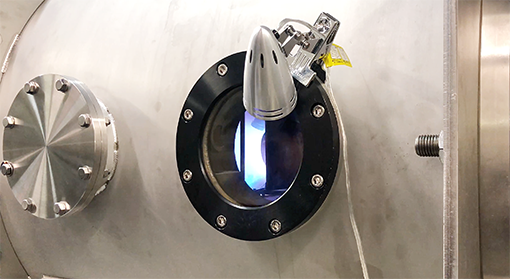
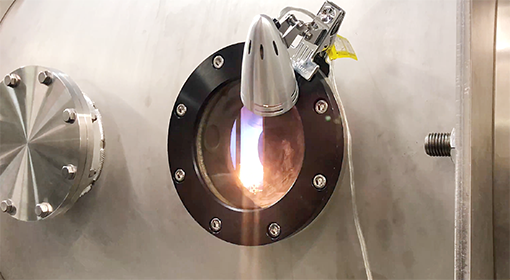
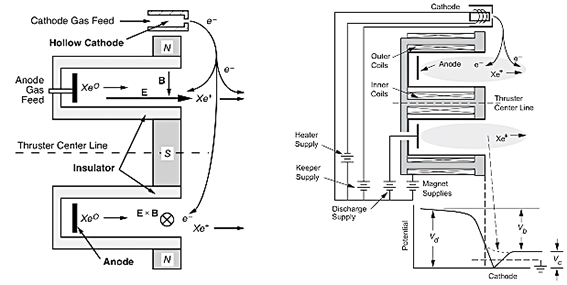
改善結構 增加推進器效率 第二週的ElectricPropulsion部分相對來說也是比較新的領域,只有以前在一些雜誌上面有看過基礎的運作方式。實際上的執行方式因為時間也只有一週的關係,所以是以先閱讀給定的資料,然後針對指定的題目進行實驗,最後進行簡報的方式進行。主要來說,在火箭方程式的限制下,化學推進燃料必須佔盡大部分的火箭質量,因此許多推進與調整作業目前是使用ElectricPropulsion的形式,其中之一的HallThruster是以Xenon作為Propellant,然而價格太高,因此希望能混入Argon之後,透過改善結構設計來增加推進器的效率,包括Isp與ThrustEffeciecny等等,整體來說的理論大致圍繞在離子化與電漿的完整度(LarmorRadius),並在最適當的時候離開推進器,獲得最高的推進效率,圖二所示為推進器進行點火的情形,圖三則是穩定運作後開啟熱電子供應(鎢絲通電)的情況。
使用電子推進的原因基本上是為了突破火箭載重的限制,以一個使用化學燃料抵達火星的任務來說,速度變化量大約是在4.5km/s,計算結果會發現燃料必須佔整體重量的67%,又若是一個更遠距離的任務,燃料比例很快就會突破99%,對整個任務造成很大的限制。因此,目前的任務在進入太空之後,會改用電子推進提升推進劑的離去速度,藉以調整軌道或是加速。 如圖四所示,為本次實驗所使用的霍爾推進器基本構型,並且是以Xe來進行設計最佳化的,其中所示的出口通道長度與寬度都被設計為3mm,然而因為Xe成本過高,希望加入Ar也作為推進劑的一部分,因此將出口通道的寬度縮減至1mm,並將長度分別提高為9mm及6mm,原因則是Ar氣體在通道中希望可以達到同樣程度的離子化前提下,經由計算LamourRadius及IonizationMean-free Path,需要提高出口長度,但是在實際的運作上,若是離子化的程度過高,則可能會讓通道內的情況過度混亂,進而降低效能。
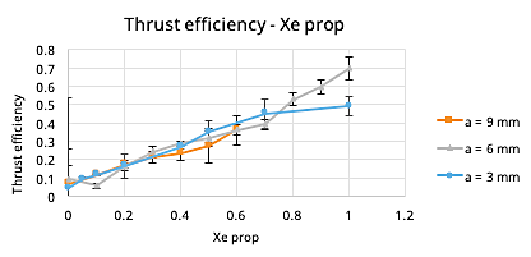
進行實驗過後並進行數據分析,可以發現在該執行狀況下以通道長度為6mm的推進效率(ThrustEfficiency)為最高,如圖五所示,如果是從ISP及dischargecurrent來看,則會發現雖然9mm的數字較高,但卻因為dischargecurrent增加太快,而導致後續的推進效率降低。
接下來的自由行動週,因為這兩年來了蠻多次日本,大部分有名的景點都踩過了,所以基本上就是滯留東京到處找一些好吃的餐廳,或是當地人比較常會去的居酒屋,隨意的聊天等行程,算是一個非常閒散的生活。
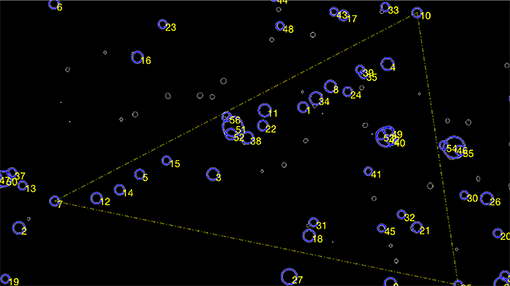
星空攝影 相關資料分析 最後兩週則是在進行亀田教授所執行的StarTracker 計畫,主要希望我們能夠利用Raspberry Pi搭配NoIR的相機模組,進行星空攝影後對於機體的位置與相關資料進行分析。雖然是分成兩組,但是實際上大家對於相關的領域都算是不太熟悉,因此同樣從資料搜集開始,主要是從影像的前處理、辨識方式到最後的運算方法,不過實務上因為拍攝上的限制,在平地(尤其是都市附近)基本上很難拍攝到星空的影像,因此我們都是以網路上的星空影像作為基準,本組以兩個方式進行,其中一個是利用Python的OpenCV套件進行編寫,另外一個則是使用Matlab進行運算後回傳結果進入Raspberry Pi。整體來說,雖然因為時間確實是非常趕,兩週要研讀資料加上撰寫程式,不過整體來說還算是有成功的,後面的有關於位置辨識的部分還是來不及,可能未來可以透過機器學習或是資料庫使用的方式達成。圖六說明程式執行的結果以及原本的對照圖。
整體來說,我覺得對於雙方的實驗室來說都算是個蠻好的互相參與行程,不過唯一的缺點可能是時間相對太短,或是說交流的項目(題目)偏多,如果是其中一項題目為時一個月,那可能會是比較好的選擇。再次謝謝各位師長,系辦的宛亭姐花了那麼多時間在進行審查、面試上,非常感謝。
地址:台灣台北市106 羅斯福路四段1號工學院綜合大樓508室 電話:(02)3366-2744 傳真:(02)2363-1755 mail:meoffice@ntu.edu.tw
National Taiwan University Department of Mechanical Engineering